

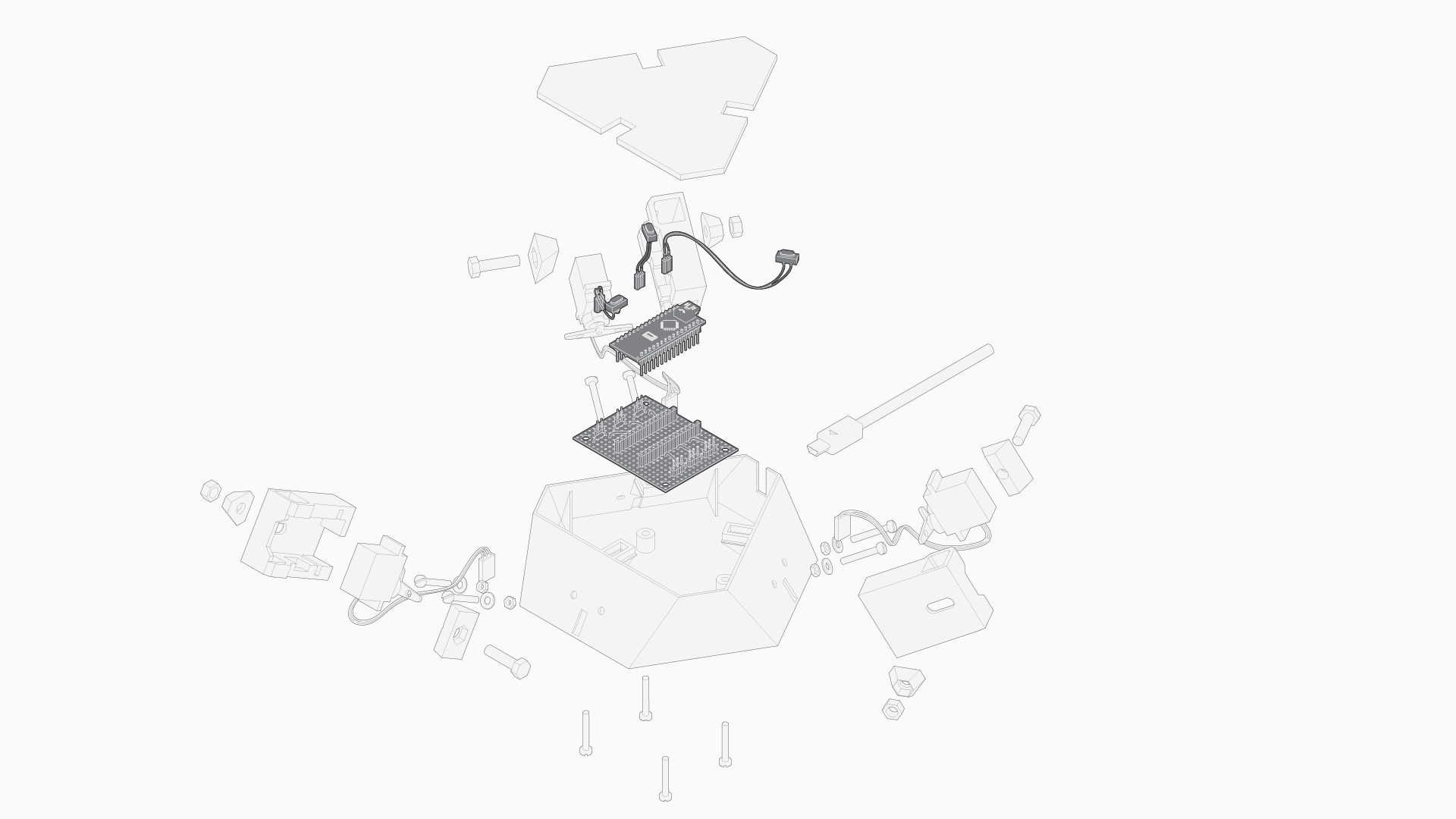

Three light sensors on the top of the robot are linked to the servos of its corresponding legs. The change in intensity of light detected by the sensory inputs are translated to the motor outputs of the legs. One of the main goals whilst developing the robot was to make it easy for people to reproduce and create on their own.